Background
As a member of the Payloads Team for Knights Experimental Rocketry’s (KXR) entrance into the International Rocket Engineering Competition (IREC), our goal was to create a robust avionics and telemetry system that could transmit and receive telemetry, regulate battery power, turn on and off different electrical and camera systems through the rocket, and transmit live video which could be viewed on the ground. Additional points would be scored in the competition if the payload could fit in a cube-sat form-factor.
Working with the aerostructures team, we came to the compromise that the nose cone of the rocket would be made with RF-transparent fiberglass, while the rest of the rocket would be made of RF-blocking carbon fiber. Because we couldn’t fit all the electronics in the nosecone, we created a system architecture where the telemetry system was housed in the nosecone and the data gathering, power distribution, and camera system housed in a lower carbon-fiber bay. I oversaw the telemetry system, power distribution system, camera system, and the payload housing.

System Architecture
The telemetry system, power distribution system, and data gathering system were all designed to communicate over a CAN bus. Upon connection to the battery, the power distribution board would enable power to the nosecone telemetry board, which would then begin communicating over a 433 MHz telemetry link with our ground station. The ground station had a series of switches that could be used to send commands to power on different systems, such as video recording, video transmission, and data collection systems. The ability to power on and off these systems is critical, as the rocket will be sitting on the launch pad powered on for large periods of time, and both power usage and heat generation must be mitigated.
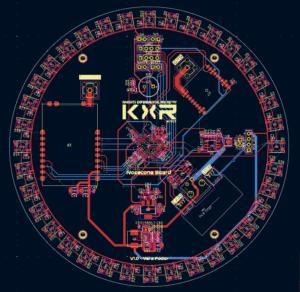
Nosecone Telemetry Board
The nosecone telemetry board is a round PCB that consists of a STMF401 microcontroller, 433MHz LoRa module, GPS module with integrated patch antenna, voltage regulators, CAN bus transceivers, and addressable LEDs to display status.



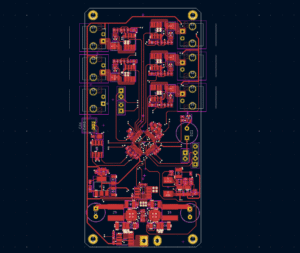
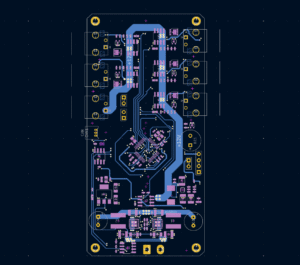
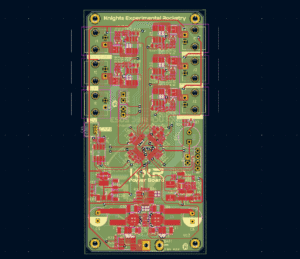
Power Distribution Board
The power distribution board consists of a STMF401 microcontroller, CAN transceiver, high-current dual 12v buck regulators, and 5 individually controllable high-side output channels each with current measurement.

Video System
To transmit high-quality long-range video from the rocket I found that the open-source digital video transmission system, OpenHD, would be perfect. OpenHD functions similarly to commercial digital FPV systems (DJI FPV, HDZero, etc), except instead of requiring expensive dedicated hardware, it uses off-the-shelf monitor-mode capable WiFi cards and single board computers. Our system consisted of a Raspberry Pi 4b and Raspberry Pi Camera, an Alfa 2.4GHz WiFi card, and a 2.4GHz 2-watt RF amplifier. A Ham Radio callsign was transmitted with the video in accordance with FCC regulation. The recorded video was taken using a RunCam Split. The entire video system could be remotely powered on from the power distribution system.

Payload Housing
To house the majority of the payload inside of the upper carbon-fiber tube, I designed a cube-sat form factor enclosure that was 3D printed out of polycarbonate. Each electronic component could be mounted to the correct wall, and then the four walls could be assembled to make the full cubesat. Four metal plates ran across the sides of the enclosure and connected to the upper bulkhead to hold the payload in place vertically, while 3D-printed spacers were used to hold it in place horizontally against the inner rocket body.
Antenna Ground Station
To receive the live video and maintain a bi-directional telemetry link with the rocket. I designed a tripod-mounted antenna system that could rotate both laterally and vertically to manually keep the antennas pointed at the rocket during flight. The antennas consisted of a 433 MHz Yagi for telemetry and dual 2.4GHz Yagi / 2.4GHz patch antennas for diversity receiving of the live video. The antennas and their 3D-printed rotating bracket were mounted on a large speaker tripod. Coaxial cables connected the antennas to a base station box which housed dual monitor-mode WiFi modules for the video and the same 433 MHz LoRa module with additional supporting components for telemetry.
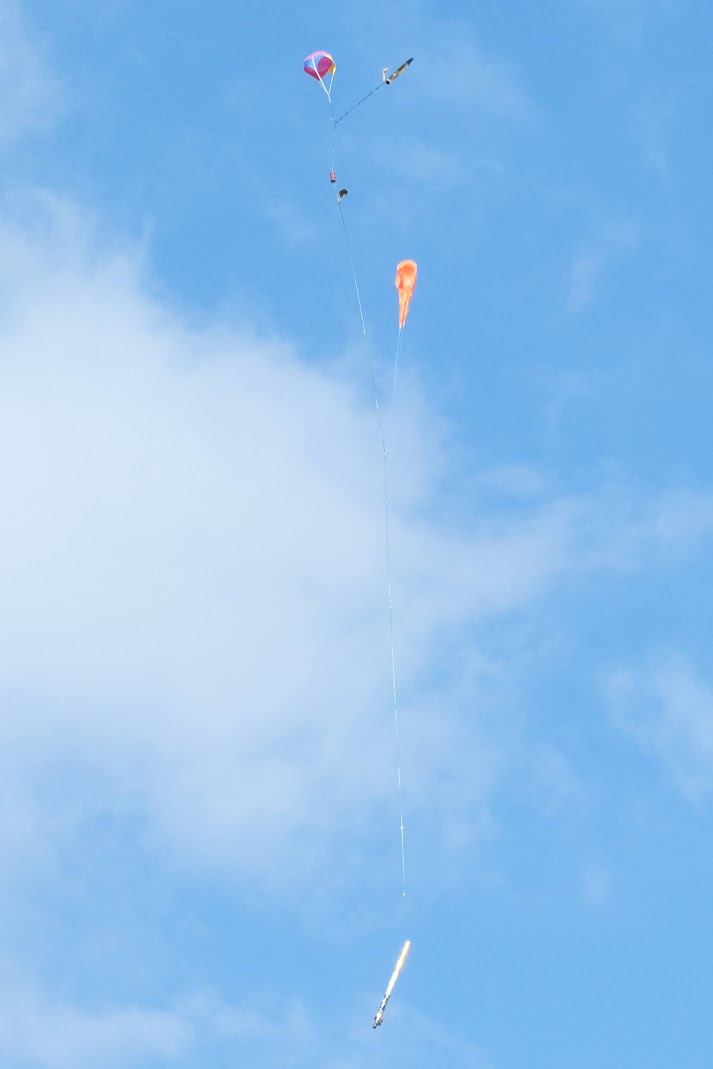
Launch Day
Due to Nitrous Oxide sourcing issues at the IREC competition in New Mexico, we could not launch then, but with the support of the Tampa Bay Rocketry Association, we were able to launch Pegasus the following Fall. During the launch, the telemetry system functioned perfectly, allowing for remote power-up of different systems as well as receiving sensor data and GPS during launch. The live video system also functioned, but unfortunately, in the excitement of the moment, the person tasked with keeping the antennas pointed at the rocket forgot do so, so only a few video frames were received through the duration of the flight. The onboard recording camera also powered up perfect and recorded video through the flight.